Controlling a Servo Using PWM
Servo motors (servos) are available in a wide range of sizes amd capabilities. A servo makes it easy to add controlled motion to a project.
The application below sweeps a servo through 0 to 180 degrees and back to 0 repeatedly.
Code
using System.Threading;
using SecretLabs.NETMF.Hardware.NetduinoPlus;
using ArduinoLib;
namespace ServoTest
{
public class Program
{
public static void Main()
{
Servo servo = new Servo(PWMChannels.PWM_PIN_D9, 1000, 2000);
while (true)
{
for (int angle = 0; angle <= 180; angle++)
{
servo.Angle = angle;
Thread.Sleep(40);
}
for (int angle = 179; angle > 0; angle--)
{
servo.Angle = angle;
Thread.Sleep(40);
}
}
}
}
}
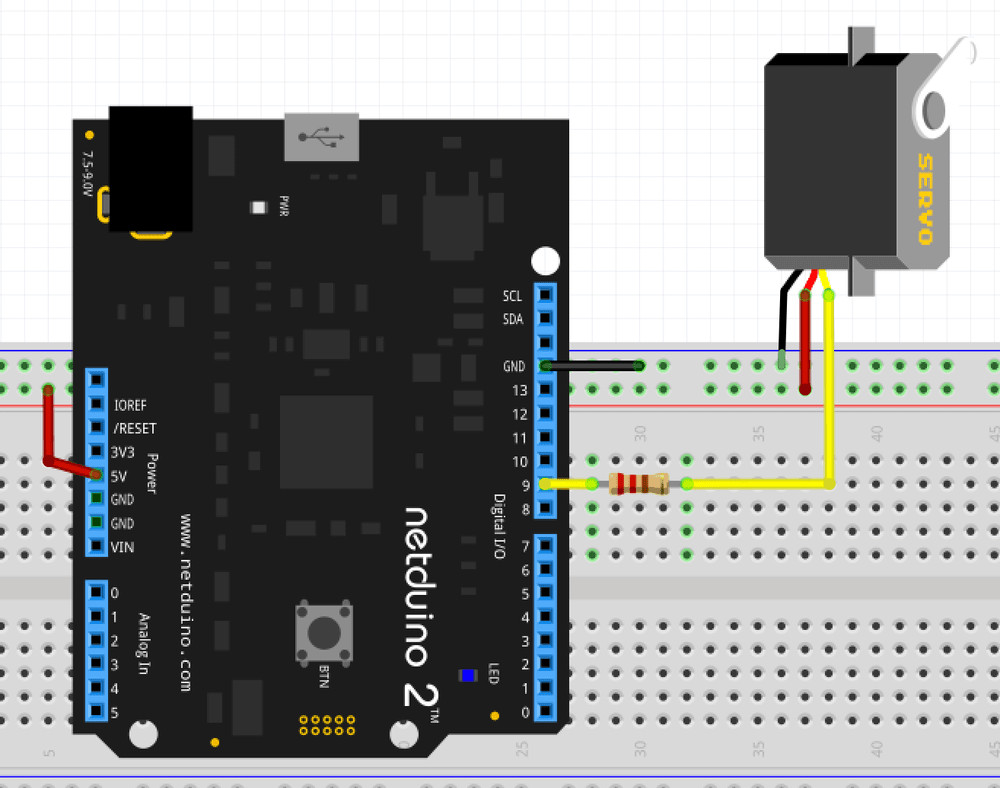
Hardware
Connect the Netduino to the servo as follows:
Netduino Samples Github Repository
Full source code for all of the samples can be found in the Netduino Samples repository on Github.