Meadow.Foundation.Motors.Stepper.A4988
| A4988 | |
|---|---|
| Status | |
| Source code | GitHub |
| Datasheet(s) | GitHub |
| NuGet package |  |
Code Example
private A4988 a4988;
public override Task Initialize()
{
a4988 = new A4988(
step: Device.Pins.D01,
direction: Device.Pins.D00,
ms1Pin: Device.Pins.D04,
ms2Pin: Device.Pins.D03,
ms3Pin: Device.Pins.D02);
return base.Initialize();
}
public override Task Run()
{
var stepDivisors = (StepDivisor[])Enum.GetValues(typeof(StepDivisor));
while (true)
{
foreach (var step in stepDivisors)
{
for (var d = 2; d < 5; d++)
{
Resolver.Log.Info($"180 degrees..Speed divisor = {d}..1/{(int)step} Steps..{a4988.Direction}...");
a4988.RotationSpeedDivisor = d;
a4988.StepDivisor = step;
a4988.Rotate(180);
Thread.Sleep(500);
}
}
a4988.Direction = (a4988.Direction == RotationDirection.Clockwise) ? RotationDirection.CounterClockwise : RotationDirection.Clockwise;
}
}
Sample project(s) available on GitHub
Wiring Example
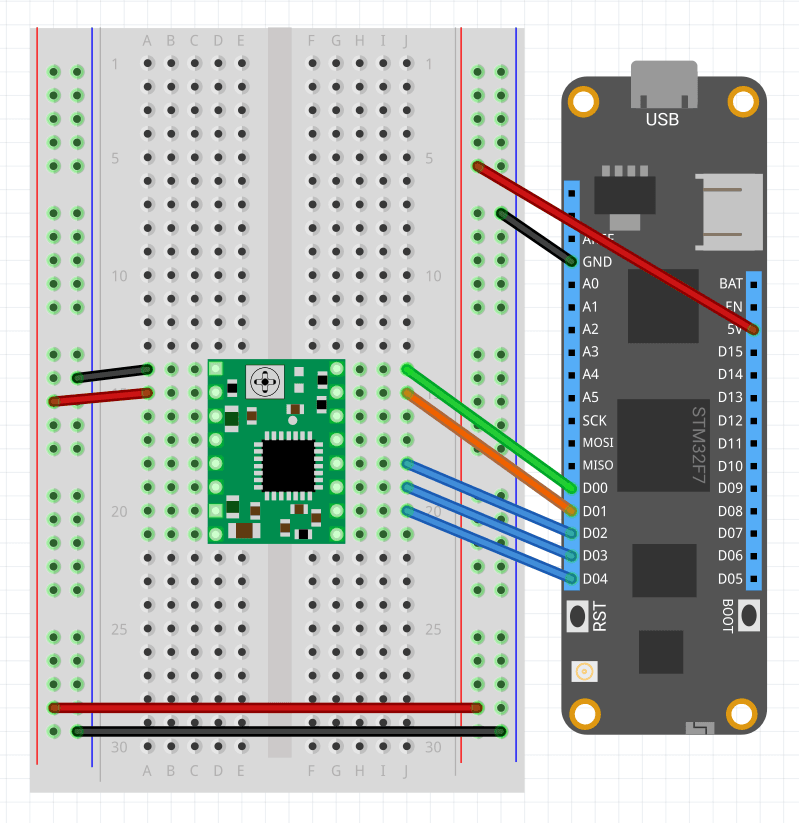
To wire a A4988 to your Meadow board, connect the following:
| A4988 | Meadow Pin |
|---|---|
| GND | GND |
| VCC | 5V |
| STEP | D01 |
| DIRECTION | D00 |
| M1 | D04 |
| M2 | D03 |
| M3 | D02 |
It should look like the following diagram:
Class A4988
This class is for the A4988 Stepper Motor Driver
Assembly: A4988.dll
View Source
public class A4988 : IDisposable
Implements:
System.IDisposable
Properties
StepAngle
Gets or sets the angle, in degrees, of one step for the connected stepper motor
View Source
public Angle StepAngle { get; set; }
RotationSpeedDivisor
Divisor used to adjust rotational speed of the stepper motor
View Source
public int RotationSpeedDivisor { get; set; }
Direction
Sets or gets the direction of rotation used for Step or Rotate methods
View Source
public RotationDirection Direction { get; set; }
StepDivisor
Divisor for micro-stepping a motor
This requires the three micro-step control lines to be connected to the motor
View Source
public StepDivisor StepDivisor { get; set; }
StepsPerRevolution
Gets the number of steps/micro-steps in the current configuration required for one 360-degree revolution
View Source
public int StepsPerRevolution { get; }
IsDisposed
Is the object disposed
View Source
public bool IsDisposed { get; }
Methods
Rotate(float, RotationDirection)
Rotates the stepper motor a specified number of degrees
View Source
public void Rotate(float degrees, RotationDirection direction)
Parameters
| Type | Name | Description |
|---|---|---|
System.Single | degrees | Degrees to rotate |
Meadow.Peripherals.RotationDirection | direction | Direction of rotation |
Rotate(float)
Rotates the stepper motor a specified number of degrees
View Source
public void Rotate(float degrees)
Parameters
| Type | Name | Description |
|---|---|---|
System.Single | degrees | Degrees to rotate |
Step(int, RotationDirection)
Rotates the stepper motor a specified number of steps (or microsteps)
View Source
public void Step(int count, RotationDirection direction)
Parameters
| Type | Name | Description |
|---|---|---|
System.Int32 | count | Number of steps to rotate |
Meadow.Peripherals.RotationDirection | direction | Direction of rotation |
Step(int)
Rotates the stepper motor a specified number of steps (or microsteps)
View Source
public void Step(int count)
Parameters
| Type | Name | Description |
|---|---|---|
System.Int32 | count | Number of steps to rotate |
Dispose()
Performs application-defined tasks associated with freeing, releasing, or resetting unmanaged resources.
View Source
public void Dispose()
Dispose(bool)
Dispose of the object
View Source
protected virtual void Dispose(bool disposing)
Parameters
| Type | Name | Description |
|---|---|---|
System.Boolean | disposing | Is disposing |
Implements
System.IDisposable